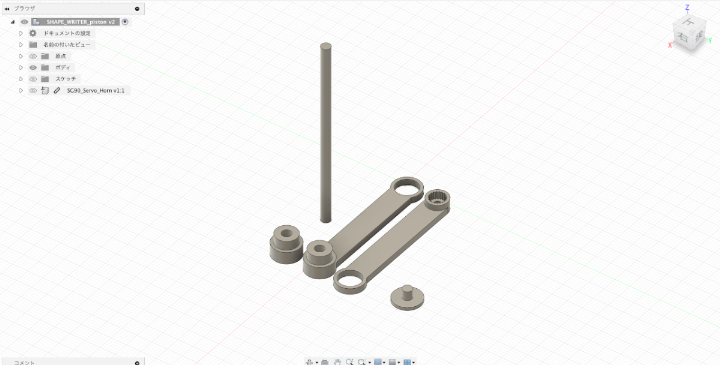
PistonArm的设计
PistonArm-1
2025/06/05
开始基于曲柄机构开发PistonArm。
发现存在臂体间干涉、装配过紧导致动作生硬等问题。

试制品
2025/06/05
实际打印成品。
不仅动作过于僵硬,臂体间还发生干涉导致无法使用。
但基本设计被延续至最终版本,其简洁结构使该机构具备相当高的易用性。

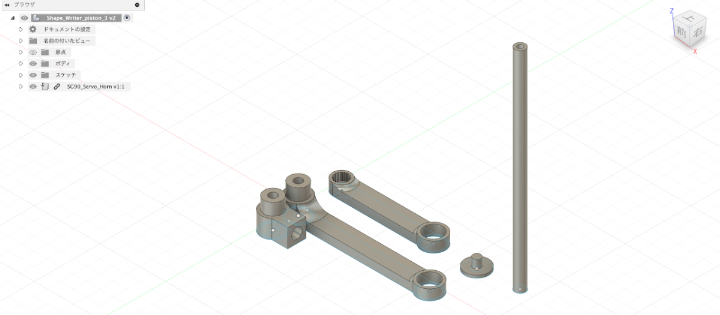
PistonArm-2
2025/06/06
通过微调轴套配合松紧度使动作更流畅。
同时延长部分结构缓解了干涉问题。
但导致机械臂根部易折断。

PistonArm-3
2025/06/06
通过在连接根部添加圆角增强强度。
推杆长度也达到设计要求。
将采用此方案,并据此设计主体结构。

文字提供系统主机
Vendor-1
2025/06/27
挤压机构的设计基于PistonArm。
该设计侧重于速度、精度和易于组装,以满足 3D 打印的需求(为了赶上演示截止日期,并允许通过再制造来更换缺陷产品)。
实际上,该设计略显粗糙,存在一些问题,例如缺少备用字母盒就无法挤出,以及下一个字母有时会掉出来。然而,考虑到这是一个手工制作的匆忙原型,其效果已经相当令人满意,经过一些小的改进后,该版本被用于预览展示。
一个特别严重的问题是每个部件的打印成功率极低。这是由于打印高大物体时采用了某种程度的强制方式。这些问题在预览展示之后对文字提供系统的开发方向产生了重大影响。


Vendor-1 原型机
2025/06/30
安装了伺服电机和曲轴,制作了Vendor-1原型机。
使用纸张代替墨盒。

用于预览展示的量产
2025/07/01
将生产大量Vendor-1用于预览展示。

Vendor-2
2025/07/17
Vendor-2是在预览展示中使用的Vendor-1的基础上改进而设计的。
由于展示方式的改变导致字符尺寸从6厘米缩小到4厘米,我们新型PistonArm-4的设计旨在解决所有问题。
通过在CAD中预先定位伺服电机,无需依赖估算即可实现精确设计。此外,利用我们之前在卡扣式组装方面的专业知识,我们将之前的两个独立部件拆分为三个,从而降低了打印错误的风险。
机械臂的圆杆和字符管均固定为4毫米标准,理论上可以通过使用关节无限延长字符管的长度。

Vendor-2 的批量生产
2025/07/17
生产进行到一半时,我们发现机械臂的设计与预期有所不同,因此重新打印了一遍。
通过对零件进行标准化,我们最大限度地减少了浪费。


外围部件
卡带外壳涂装
2025/07/20
用丙烯颜料将卡带外壳涂成黑色。

伺服电机连接线
2025/07/21
为了简化大量伺服电机的接线,我正在制作菊花链连接线。
共有26根电源线(5V)和26根地线。通过菊花链连接,我可以将每个伺服电机的三根连接线合并成最多四根(总共52根电源线和地线)。但是,由于功率容量较大,因此需要一个大功率电源适配器。
同时,我还在制作一个只能输入字母的键盘。不知为何,我家里正好有个ISO键盘,于是就决定用它。


重新喷漆
2025/07/21
正在添加多层油漆,以消除黑色部分的不均匀。
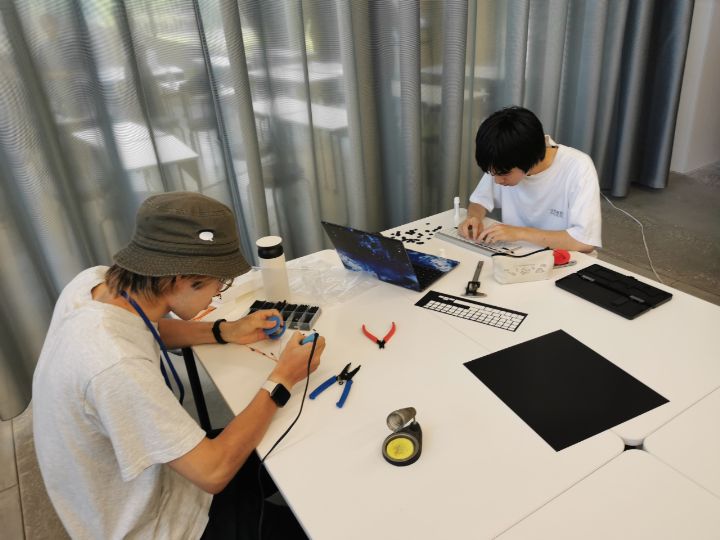
鵜饲在做什么呢……?

接线地狱
2025/07/22
就在正式展览开始前。将电线连接到伺服电机。
虽然我做了菊花链连接线,但这仅仅减少了电源线和地线的数量。我需要用导线将信号线连接到所有26个通道。每个通道都连接到Arduino Mega的GPIO引脚。
真是令人难以置信!

给盖子上色
2025/07/22
我还把墨盒盖涂成了黑色,因为我临时需要更换它。
拓竹科技A1 mini的打印速度非常快,而且很稳定。
