传送带v1
传送带设计启动
2025/06/03
分工体制确定后,立即拆解TECH☆TECH的旧作品,利用原定废弃的木材制作框架。
随后确定大致设计方针,采购轴承与橡胶带。

轴杆采购
2025/06/12
因先行采购轴承,需购买φ10轴杆,但铝管仅有φ9或φ12规格,故另寻替代品。
在木材卖场发现桧木圆棒φ10x1820mm,决定采用此材料。

开始组装
2025/06/14
设计并打印外径φ900(不含法兰)的大型滚轮轴。
单次打印耗时超过5小时。利用大学闭馆后多台设备并行打印,有效节省时间。

组装续篇
2025/06/15
继续组装。复用田宫的齿轮箱与坦克(履带)机体套装,采用同步链条实现驱动轮动作同步的结构。
因轴径增大,两组输送单元连接处的间隙过大导致文字部件脱落,故决定仅在连接部位使用φ35的小型轴。
电源采用两节D型电池供电,输出3V电压。


v1 完成
2025/06/16
追加订购的橡胶带也已交付,进入最终组装阶段。
每条橡胶带长度为1000毫米,通过大量订书钉和塑料胶带将多条橡胶带连接起来。电气布线部分请菅原协助完成。
试运行时发现若干问题点:
-
因手工连接橡胶带无法保证平直度,加之从框架到轴的固定均采用粗放式手工组装,导致受力张力分布不均。
-
连续运行时皮带会持续向轴外侧偏移。虽因端轴带法兰而避免完全脱落,但仍令人担忧。
-
齿轮箱发出巨大噪音。因未添加润滑油,计划尝试注入润滑剂(如KURE556)观察效果变化。
-
轴间距过大(290mm间隔),导致输送带承载物品时产生明显下垂。
-
链轮会从电机轴上脱落导致空转。用手指按压可复位,但过段时间又会脱落。
尽管如此,我们还是成功完成了能实际承载物品(文字)的输送带。看着它运转相当有趣——虽然噪音有点大。
在6月17日的中期汇报中,除齿轮噪音外未被指出其他问题。


传送带v2
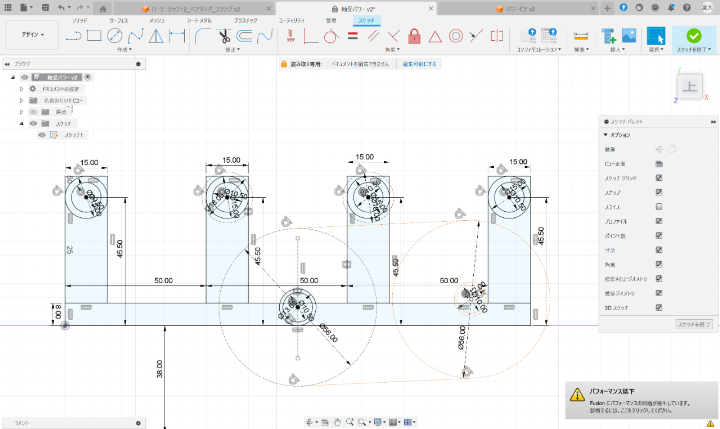
针对v2版本的规格研讨
2025/06/18
为提升稳定性,如所示图片所示,建议缩小滚轮轴尺寸并增加数量。
此外,正探讨采用Nema17步进电机作为新型驱动器,并设计弧形轴杆防止皮带脱轨等新方案。

v2 正式启动
2025/06/19
在方向性基本确定后,正式启动制作。同时重新订购电机,取消Nema17型号的使用。
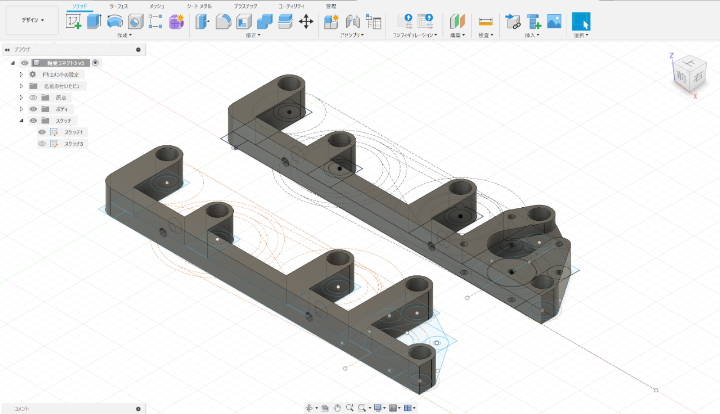
滚轮轴结构如下:
-
外径φ34~40,弧形设计,带轴承法兰(两端动力轴)
-
外径φ34,直线型,无轴承,带法兰(间隔设置的导向轴)
-
外径φ34,直线型,带轴承,无法兰(用于张力调节)
-
外径φ18,直线型,无轴承无法兰(支撑用,俗称竹轮)
将根据需求组合使用上述部件。与ver.1相比虽实现大幅缩小尺寸、降低高度,但因轴数量显著增加,成本并未降低。且加工过程相当繁琐。
此外因轴间距缩小,轴承也需重新设计。此前每根轴使用4颗固定螺钉,但轴数量大幅增加时维持原螺钉数量比例会造成浪费,故改为8颗螺钉固定5根轴。效率提升达2.5倍。

v2 续篇
2025/06/22
收集大量打印好的零件进行组装。
然而简单地堆砌并不足够。部分零件还误用了旧版本的打印件。打印耗时较长,应当提前计算好所需数量(反省)。
再次利用大学资源进行批量打印——虽然夜间禁止入内,但打印机可全天候运行。每次操作时都暗自祈祷中途不会发生故障停机。


v2 终见曙光
2025/06/23
即便如此大量打印,重新清点后零件仍告短缺。究竟要持续到何时?
答案很明确:直到稳定运行为止。
于是继续推进。虽因新型动力设计失误、3D打印机状态不佳等诸多问题,但总算将几乎所有零件装配到较长的框架上(动力部分尚未安装)。
另外在敲入轴承时,不小心敲到了食指导致内出血。大家务必小心。
附图是受伤的大渕缺席时,由渡边(TECH☆TECH成员)代劳将轴承和轴敲入轴套的场景。


v2失败
2025/06/24
因未确认解决诸多问题便强行推进完成,导致问题频发。
-
新订购的小型齿轮电机体积过小,完全无法提供足够旋转扭矩。
-
紧急改用田宫齿轮箱,但该部件本身存在问题(链轮脱落导致空转、噪音过大、占用空间等)。
-
不仅未改善自ver.1延续至今的最大问题——皮带脱轨现象,反而更加严重。
-
尤其在动力单元中,皮带脱轨导致皮带卡入正时链条与齿轮之间。
综上所述,ver.2现阶段无法投入使用。考虑到连物体搬运这类最基本功能都无法正常运作,甚至可以说比ver.1更糟糕。
决定在保留基本设计的基础上,大幅修改各部件设计,开发ver.2.1版本。


传送带v2.x
面向v2.1版本
2025/06/25
相较于ver.2的主要变更点:
-
大幅增大法兰尺寸,有效抑制皮带偏移
-
将轴承连接件(前后模块连接部位)与轴承动力单元(电机安装的动力部分)整合为单一组件
-
通过减少输送机整体张力较大的滚筒轴数量,降低摩擦以节约所需旋转扭矩
-
经反复推敲,最终采用Nema17电机(Arduino控制)
此外,因日程安排限制,7月1日预展将仅使用部分输送模块(暂定总长2.5米中仅启用800毫米段)。该方案因零件数量精简,具备更强的故障恢复能力。
私人垃圾袋里塞满了大量不再使用的旧版3D打印零件。虽觉可惜却无可奈何……

v2.1完成,但
2025/06/27
虽然ver.2.1已完成,但存在根本性问题:
-
动力轴与皮带接触面积不足导致打滑
-
尝试缠绕双面胶带等方法均无效
-
若为增加摩擦力而加大张力,则会导致扭矩不足
因此决定升级至ver.2.2版本:将动力轴移至两端,并在两端配置电机(实现双电机驱动)。
值得一提的是,在此期间恰逢参加“hebocon25”活动,导致日程安排异常紧张。虽已濒临崩溃边缘,但在TECH☆TECH成员的协助下总算挺了过来。
这张照片拍摄于东京行巴士发车前一小时,当时我们正因装置无法正常运转而束手无策。


v2.2完成
2025/07/03
通过将动力轴置于末端,实现了高效张力传递,运行稳定性显著提升。这下总算能松口气了。
此外在控制系统中接入两个拨动开关,实现了手动双向运行功能。原本只是为测试动作而添加的装置,没想到意外形成可用于展示的流程,令人忍俊不禁(详情参见整体情况)。


改为黑色
开始打印黑色部件
2025/07/14
为突出文字的白色,同时增强作品整体感并确保与背景的对比度,决定将所有构造部件统一为黑色。
原型制作室免费提供的线材仅有白色。已订购拓竹科技原装PLA Basic线材(黑色)2公斤,将用于打印滚轮轴。由于无法像往常那样多台并行打印,耗时较长。


黑色部件打印续篇
2025/07/19
滚轮轴打印完成后,接下来打印轴承。
同时打印链轮和垫圈。
(打印完成提示音响起)


黑色传送带完成
2025/07/20
大功告成。木框由鵜飼负责喷涂,请看这令人心醉神迷的绝美效果(自我夸耀)。宛如iPhone7的亮黑色(?)
运行状态良好。黑色涂层未引发新问题,至此传送带主体(ver.2.2-B)宣告完成。接下来大渕将着手处理资料整理、展品设备配置等杂务。
实际驱动传送带的Arduino编程工作将委托鹈饲负责。拜托了!
